

The VIRTUALDiver platform combines high-resolution data acquired and processed with state-of-the-art technologies (swath mapping systems, underwater vehicles, unmanned aerial vehicles) to create a synthetic topographic relief basemap and to analyze its geomorphological and ecological structures as well as anthropogenic interventions.
For underwater data collection BlueROV2 from Blue Robotics is used. It is the one of the world’s most affordable high-performance ROV. The smooth, stable, and highly maneuverable Open Frame ROV is comprised of six thrusters, a rugged frame, and quick swappable batteries. BlueROV2 has the best thrust-to-weight ratio in its class to perform demanding tasks. It is ideal for operations in shallow to moderate waters, with a standard 100m depth rating and up to 300m tether lengths available. Using famous and reliable open-source software as well as high-quality autopilot hardware it able to provide autonomous capabilities rarely seen in mini-ROVs.
Key ROV Features:
- Live Low-Latency 1080p HD Video
- Highly Maneuverable Vectored Thruster Configuration
- Stable and Optimized for Inspection and Research-Class Missions
- Highly Expandable with Three Free Cable Penetrators
- Standard 100m Depth Rating and up to 300m Tether Available
- Battery Powered with Quick-Swappable Batteries for Long Missions
Data are processed using the Photogrammetry Structure-by-Motion technique. It is a highly developed technique whereby high-resolution 3D topographic images and digital models can be produced. The requirements arising from the use of this technique also determine how the ROV is handled for data collection.
Initially, there are two types of data from the two different cameras that are installed on the ROV. The built-in camera sends a live feed to the operator's computer and is used for navigation, while simultaneously recording the video throughout the survey. These files are used not only for recording but also for evaluating the process, as well as supplementary material if required during the processing phase.
The second camera captures the terrane with the time lapse technique. More specifically it stores photos at predefined intervals of 0.5, 1, 2, or 5 seconds, depending on the speed we intend to move the ROV and the requirements of the area.
The collected photos are processed by photogrammetry programs therefore must meet some necessary requirements. They should be clean, not shaky or blurry, at a constant distance from the basement and contain no foreign objects such as fish, rubbish, etc. Most important of all, each photo is 60% to 80% overlapping in order to have a good output in the 3D model.
To meet these requirements the operator must scan the study area by delineating paths parallel to each other approximately 1m apart at a constant distance from the relief. It then must repeat the process in a direction perpendicular to the one it had before, thus creating an imaginary grid that eliminates the possibility of some point being left underexposed.
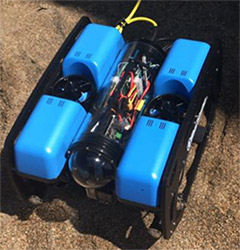
ROV used

Methodology used during data collection
Up2metric’s team focuses among other, in 3D reconstruction from images. Towards a photorealistic and accurate 3D representation of Oia, Fira and Kameni at Santorini, up2metric utilizes a latest generation drone (Phantom 4 Pro) and a GNSS station. The purpose of the drone survey is to capture /storage/images, both vertical and oblique. The goal is to have clean and of high quality, imagery. The /storage/images have great overlap along the axes and the flight height varies from 30-60 meters, depending on the terrain type, the area flown and the desired GSD (Ground Sampling Distance). The drone is a Phantom 4 Pro, one of the most popular drones in the market and that’s because of two main reasons. Firstly, it has an autopilot and many additional sensors, and thus, an ultra-safe and stable flight. Secondly, provides with high quality data, /storage/images with georeference etc. Innovative methods developed by up2metric for drone imagery collection and processing will lead to a more accurate 3D reconstruction of high interest scenes.

UAS used by Up2metric

A typical image captured by Phantom 4Pro (OIA)
Through a set of special designed tools for multimedia content management, the platform can produce tailored interactive experiences for virtual reality and augmented reality environments. The platform will be piloted for the submarine area of the Santorini (Greece) caldera and will enable users to explore virtually environments -accessible only by underwater vehicles and in cost-intensive, research and scientific missions. Users will be able to assimilate to real (or even imaginary) environments through different media (e.g., virtual reality glasses, tablets, etc.).
With the use of innovative tools and design practices, based on interdisciplinary collaboration among scientists and experts of diverse scientific fields, the VIRTUALDiver platform aims at the mass development and dissemination of onshore and offshore territory “hands-on” experiences. Main objective is to reinforce special forms of tourism, such as cruise tourism, scuba diving tourism, scientific tourism and others. The platform features three subsystems: the subsystem for the management of geospatial backgrounds, the subsystem for the creation of points of interest, as well as the subsystem for the development of storytelling scenarios to achieve interactive experiences. It will apply digital bathymetric data, imprints of the seafloor relief from remotely operated underwater vehicles (ROVs), as well as topographic data of aerial- and ground based photogrammetry from unmanned helicopters (drones), in order to compose 3D digital visuals of specific territories of tourist/environmental interest, in high resolution. The VIRTUALDiver platform design team will utilize the aforementioned technologies and the possibilities they offer for the implementation of interactive experiences, using Virtual Reality (VR) και Augmented Reality (AR) technologies, through a series of specially designed tools of multimedia content management.
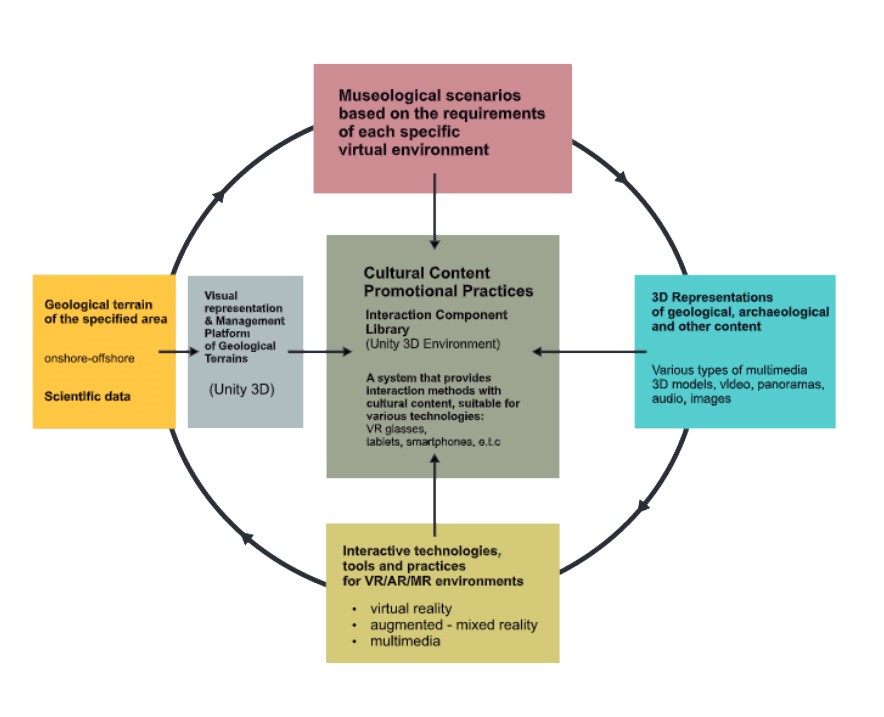
Overview of VIRTUALDiver platform